搬运、码垛机器人

项目 | 应用场合 | |
弧焊、搬运、喷涂、上下料 | ||
结构 | 多关节型 | |
关节数 | 6轴 | |
放置方式 | 任意角度 | |
最大动作速度 | J1轴 | 280°/s |
J2轴 | 220°/s | |
J3轴 | 300°/s | |
J4轴 | 240°/s | |
J5轴 | 480°/s | |
J6轴 | 480°/s | |
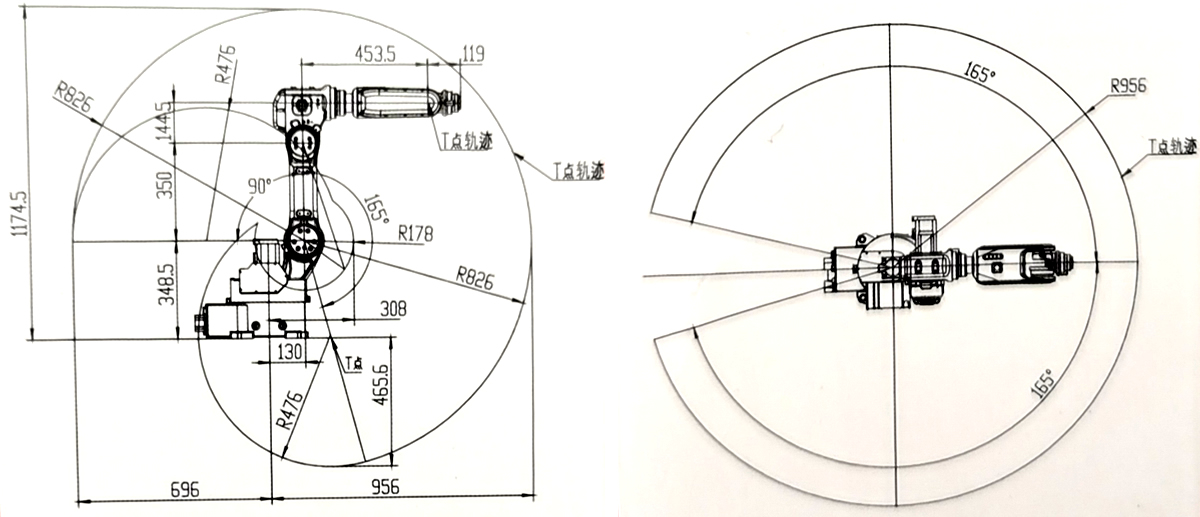
最大动作范围 | J1轴 | ±165° |
J2轴 | +90°/-165° | |
J3轴 | +150°/-90° | |
J4轴 | ±180° | |
J5轴 | +120°/-120° | |
J6轴 | ±360° | |
最大活动半径 | 950mm | |
手部最大负载 | 最大8kg | |
重复精度 | ±0.08mm | |
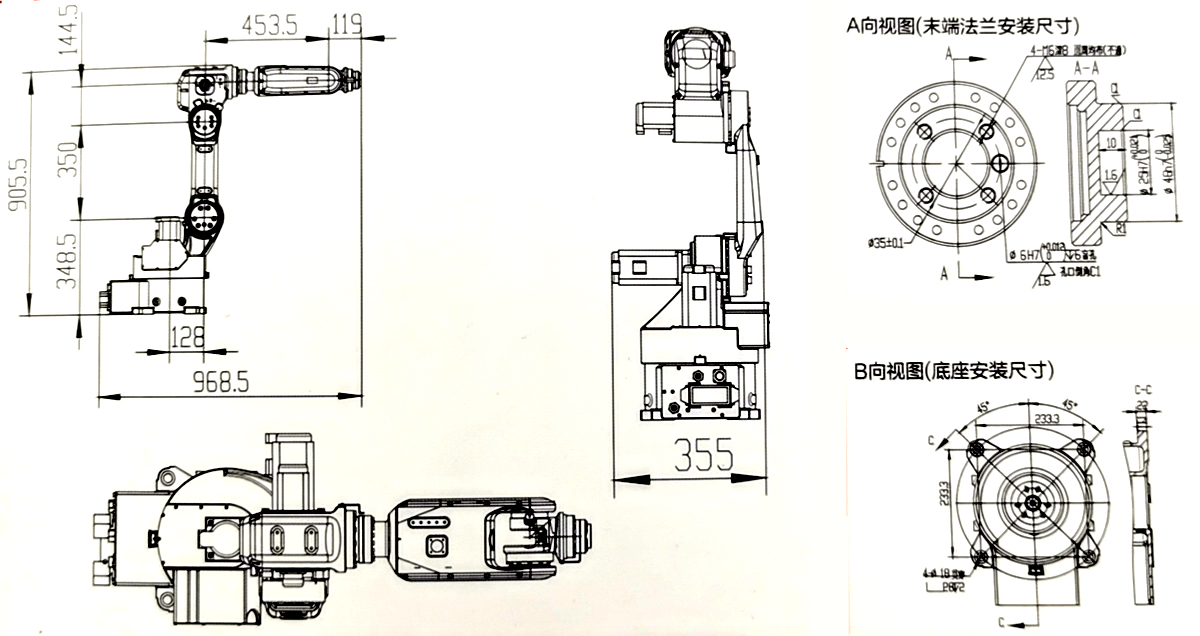
机器人底座尺寸 | 280*362mm | |
机器人高度 | 905.5mm | |
工作环境温度 | 0-45°C | |
机器人本体重量 | 56Kg | |
驱动方式 | 使用AC伺服电机驱动 | |
环境湿度 | 95%RH以下(无结露) | |